Proyecto Hexápodo
Noé Cruz, David Anaya y Daniel Palomera
Estudiantes de Ingeniería
El estudiante de la Ingeniería en Sistemas Computacionales se caracteriza por ser un individuo inquieto, con curiosidad e interés hacia lo nuevo. El sentido de su formación, le obliga a sensibilizarse sobre la importancia del trabajo interdisciplinario en las diversas áreas de la ciencia y la tecnología relacionadas con la computación. Entre ellas la tecnología de la información, las telecomunicaciones, la interacción con los sistemas físicos (sistemas dinámicos) y el uso de la computadora para asociarlos y obtener soluciones a problemas específicos relacionados.
Las líneas básicas de formación pueden subdividirse como sigue:
• Arquitectura y funcionalidad de los equipos y sistemas de cómputo.
• Algorítmica, programación y tratamiento de la información.
Y es, justamente, dentro de esta última línea de formación que se inscribe el P royecto Hexápodo que fue realizado por estudiantes, ahora egresados, de la Ingeniería en Sistemas Computacionales que ofrece nuestra Universidad. Proyecto sobre el cual ahondaremos en las siguientes líneas.
¿Cuál es la finalidad del Proyecto?
El proyecto Hexápodo tiene fines de aprensión y manejo de microprocesadores y microcontroladores, así como también de software, especialmente ensamblador.
¿Qué es el Hexápodo y de qué partes consta?
El Hexápodo es un robot controlado por un microcontrolador: un PIC (Circuito Integrado Programable) de la serie 16f8x; no obstante que para el caso que nos ocupa, se trabajó con el 16f84, debido a que es uno de los más amigables y fáciles de conseguir.
El material del cual consta el robot incluye:
El cerebro, que consiste como se mencionó de un PIC, que ha sido programado previamente, con los programas NOV y MPLAB que a continuación se explican.
Software, como NOV y MPLAB.
PROGRAMA MPLAB
En el cual se hace el código con los mnemónicos que maneja este programa, siendo también el compilador, ya que al ser ejecutado el programa en lenguaje ensamblador, crea un archivo hexadecimal.
PROGRAMA NOV
Es el software que realiza la operación de cargado, ya que al ser ejecutado, el archivo en código hexadecimal es cargado en el PIC, utilizando como medio de escape o salida el puerto paralelo, el cual es el medio de comunicación entre la máquina (software y cargador)
Un cargador, que es un pequeño arreglo de resistores, diodos de alta velocidad, reguladores (7805) y transistores (BC548).
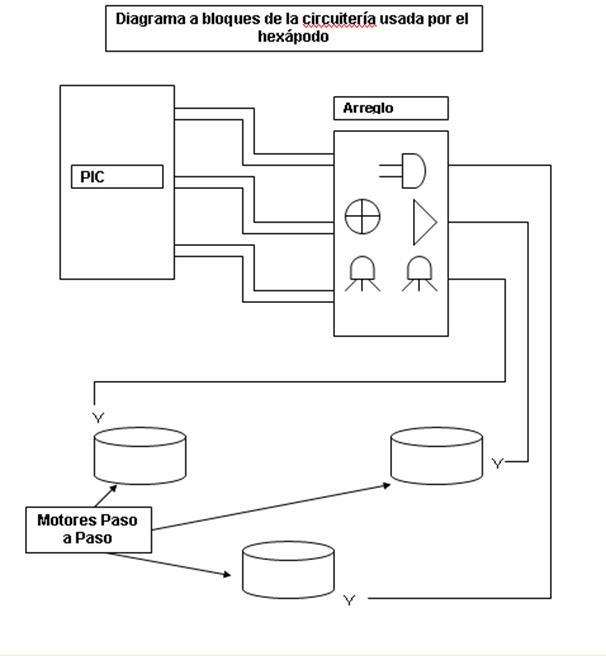
Diseño del Proyecto
El diseño a bloques de este proyecto se muestra a continuación.
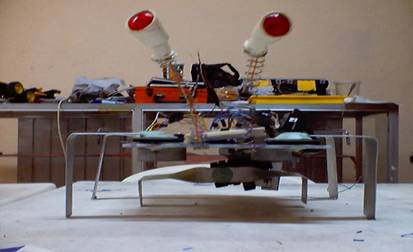
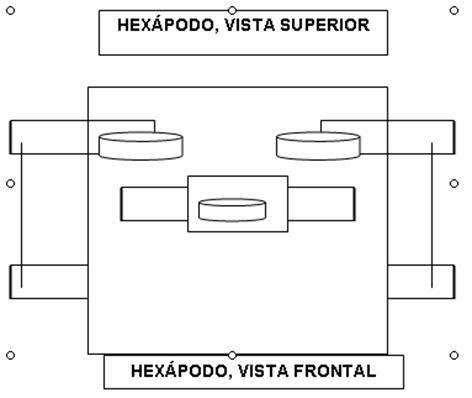
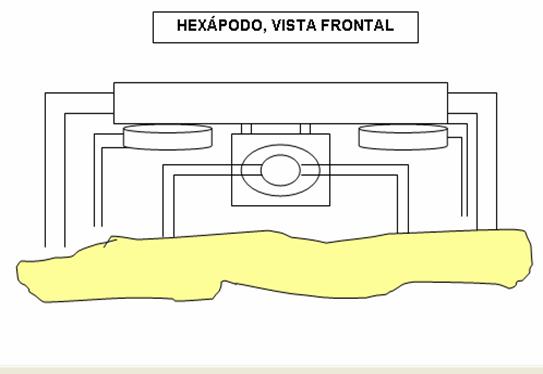
El hexápodo, es un robot que hemos diseñado con el fin de aprender la realización de máquinas, las cuales pueden imitar a algunos animales, así como también conocer el manejo de los circuitos integrados programables (PIC's). En este caso, se trata de un robot compuesto de seis patas (hexápodo), simulando el movimiento de una araña. De modo que el robot en sí, se compone de:

Seis patas movibles
Una placa base, la cual servirá para soportar los tres motores (motores paso a paso), así como también las seis patas.
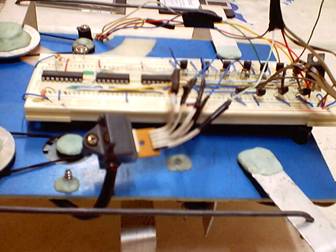
Circuitería como: compuertas lógicas, 7404, 7486, las cuales demultipléxan la señal obtenida del PIC (16f84) para manipular las bobinas de los motores y así obtener los pasos necesarios. (Véase el diagrama de circuitos graficado en la última página de este artículo)
Dispositivos Electrónicos como: transistores (BC548), resistencias (varios valores), capacitares cerámicos.
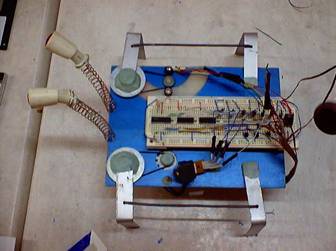
Un cerebro, un PIC 16f84 para este diseño, debido a que, como mencionamos líneas arriba, es uno de los más sencillos y amigables al ser utilizado.
Tres servomotores de frecuencia, de la serie HS300, en nuestro caso en particular fueron adaptados tres motores paso a paso, con un sistema de transmisión, el cual brinda el torque necesario para que éste se pueda mover.
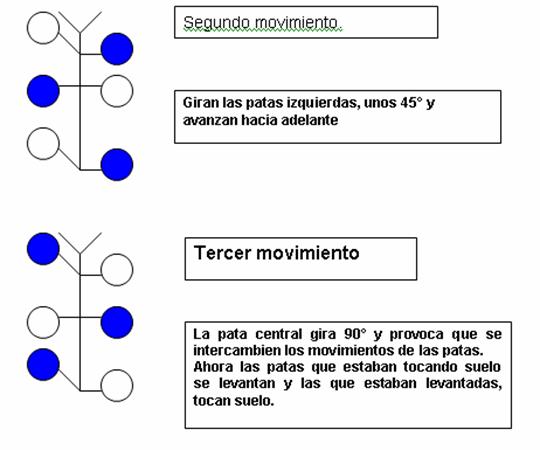
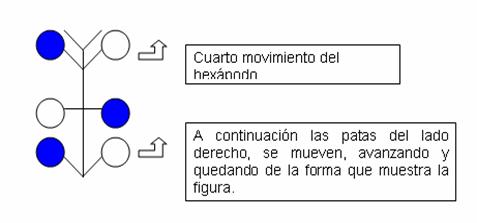
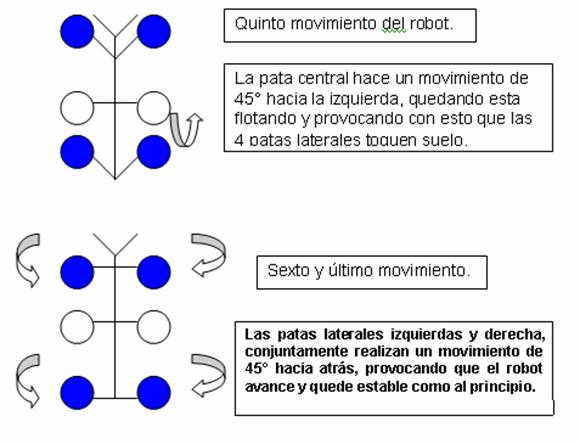
Diseño paso a paso de los movimientos del Hexápodo
El diseño siguiente muestra paso a paso la forma como debe éste moverse.
|


